Fachkonzept - Schnittstelle
Was ist eine Schnittstelle?
Wenn man es wörtlich nimmt, ist eine Schnittstelle eine Stelle, an der ein System, das in Teile zerschnitten ist, zusammengesetzt werden kann.
Quelle: Wikimedia Commons
Technische Systeme benutzen häufig Schnittstellen. Jedes Buchse-Stecker-Paar verwendet eine Schnittstelle, an der die beiden Teilsysteme kontrolliert zusammengesetzt werden.

Quelle: Wikimedia Commons
Schnittstellen treten auch bei der Entwicklung von Software-Einheiten auf. Wenn eine Software-Einheit als Modul (Baustein) zur Vefügung gestellt wird, dann muss sehr genau beschrieben werden, welche Daten von diesem Modul verarbeitet werden können, welche Auswirkungen die Verarbeitung der Daten hat und welche Daten vom Modul wieder abgerufen werden können.
Schnittstelle einer Klasse
Die Schnittstelle einer Klasse liefert alle Informationen, die man benötigt, um die Klasse benutzen zu können. Hierzu gehört eine genaue Beschreibung aller (zugänglichen) Attribute und Methoden der Klasse. Für jedes Attribut benötigt man den erwarteten Datentyp, für jede Methode die Signatur (d. h. die genaue Festlegung der Parametertypen und bei Funktionen des Rückgabetyps) sowie eine Verhaltensbeschreibung.
Hinweise zur Beschreibung der Schnittstelle einer Funktion findest du im Abschnitt Fachkonzept - Modularisierung.
Als Beispiel soll hier die Schnittstelle der Klasse Roboter betrachtet werden.
Die Beschreibung der Attribute und die Signaturen der Methoden können dem folgenden Klassendiagramm entnommen werden.
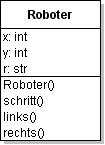
Durch die Wahl der Methodenbezeichner ist das Verhalten der Methoden bereits informell beschrieben. Anhand dieses Beispiels soll im Folgenden nichtsdestotrotz aufgezeigt werden, wie man das Verhalten des Konstruktors und der Methoden genauer beschreiben kann.
Roboter()
nachher: Ein Objekt der Klasse Roboter ist erzeugt. Die Werte der Attribut x
y und r sind initialisiert, so dass der Objektzustand {x -> 0, y -> 0, r ->'S'}
vorliegt.
schritt()
vorher: Das Roboter-Objekt befindet sich in einem beliebigen Feld und schaut in eine beliebige
Richtung.
nachher: Die Werte der Attribute x und y sind so angepasst,
dass das Roboter-Objekt einen Schritt in die aktuelle Richtung weitergeht.
rechts()
vorher: Das Roboter-Objekt befindet sich in einem beliebigen Feld und schaut in eine beliebige
Richtung.
nachher: Die Werte der Attribute x und y werden beibehalten.
Die Wert des Attributs r wird so angepasst,
dass das Roboter-Objekt eine 90°-Drehung nach rechts macht.
links()
vorher: Das Roboter-Objekt befindet sich in einem beliebigen Feld und schaut in eine beliebige
Richtung.
nachher: Die Werte der Attribute x und y werden beibehalten.
Die Wert des Attributs r wird so angepasst,
dass das Roboter-Objekt eine 90°-Drehung nach links macht.
Quellen
- Grafik: Pflanzenschnittstelle - Urheber: Bastian - Lizenz: Public Domain
- Foto: Antennenstecker - Urheber: Kolossos - Lizenz: CreativeCommons BY-SA 3.0
{kind=link}
{kind=link}